第三章课后习题答案常同立液压控制系统(上册)
|
3-1题
一种动力转向机液伺服机构参见书第66页,参考答案
动力转向机液伺服机构的工作原理如下:若向右推动机液伺服机构的控制阀芯。假设瞬时阀体不动,控制阀阀芯右移打开阀口,阀口将无杆腔与油箱接通,无杆腔内压力降低,液压缸的缸筒右移。由于缸筒与控制阀体刚性连接为一体,缸筒带动控制阀体右移,直至关闭阀口,液压缸的缸筒停止向右移动。
反之,若向左拉动控制阀芯,假设瞬时阀体不动,控制阀的阀芯左移打开阀口,阀口将液压缸的无杆腔与油泵连接,即液压缸无杆腔和有杆腔同时接油泵,液压缸差动工作,液压缸的缸筒左移动,带动控制阀体向左移动,直至关闭阀口,液压缸的缸筒停止向左移动。
3-2 题
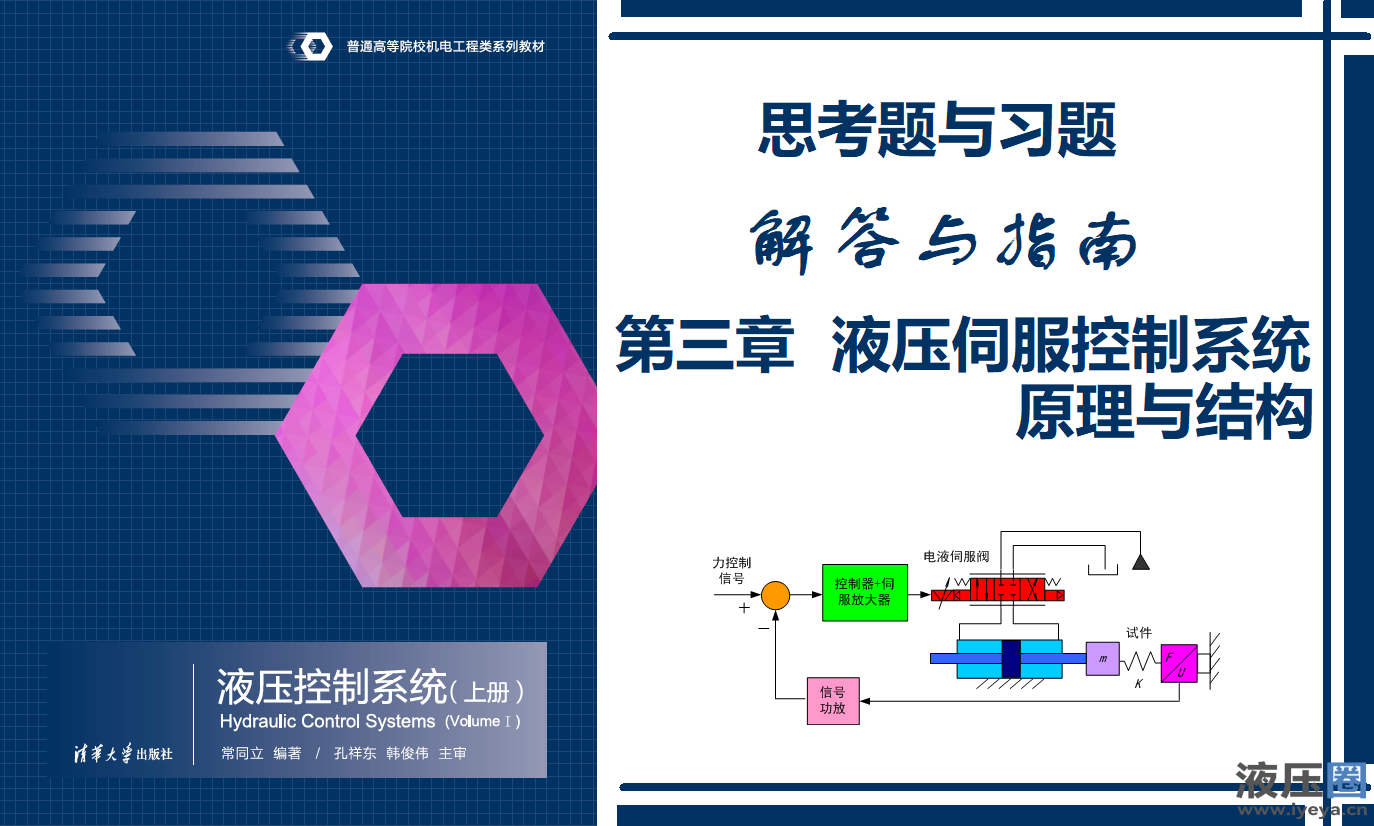
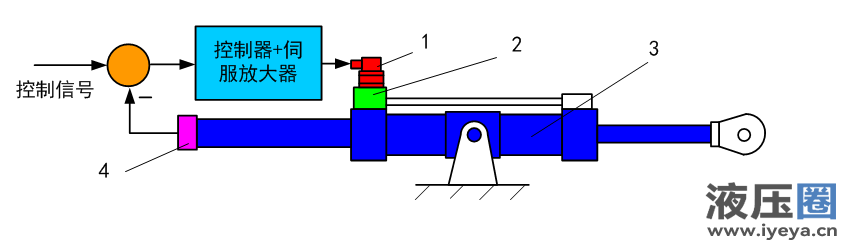
电液伺服作动器参见书第68页,参考答案
电液伺服作动器主要包括电子控制器及伺服放大器、电液伺服阀、双出杆对称液压缸、位移传感器及其信号功放等构成。
电液伺服作动器是一个电液伺服位置系统。其中控制元件为电液伺服阀,执行元件为双出杆对称液压缸。将电流信号输入电液伺服阀线圈,电液伺服阀产生流量受控的工作液,驱动液压缸活塞移动。位移传感器检测活塞位移,并将它传给电子控制装置,与控制指令信号比较产生偏差信号,偏差信号经过放大和转换等变为控制电流,控制电流被输入电液伺服阀,上述构成位置伺服控制系统。
3-3 题
参见书第74页图3-15,参考答案
在图所示变排量泵控伺服系统中,液压泵是液压变量泵,变量泵工作在固定转速下。变量泵输出工作液流量与压力受控于它的斜盘控制系统。
在变量泵的斜盘控制系统中,伺服电机拖动丝杆驱动变量泵斜盘控制机构,并构成局部负反馈的电机控制系统对斜盘角度进行控制,从而实现电信号调节变量泵排量,以便实现电信号控制液压泵输出工作液流量与方向。
变量泵输出工作液驱动和控制液压缸活塞杆位置,位置传感器检测活塞杆位置,并产生反馈信号,活塞杆位移反馈信号与位置控制指令进行比较产生偏差信号,偏差信号被送往电静液作动器EHSA控制器,它产生控制指令,并传递给变量泵斜盘控制系统,从而构成位置负反馈控制系统。
3-4题
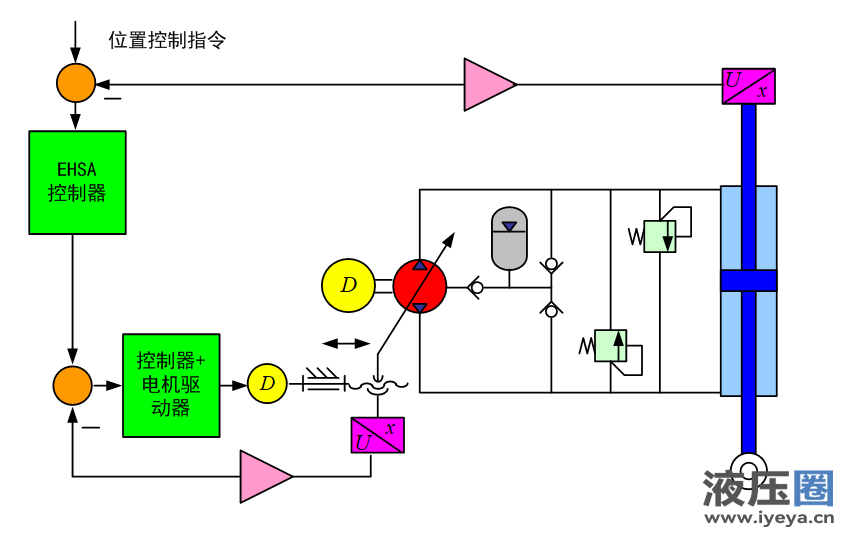
参见书第74页图3-16,参考答案
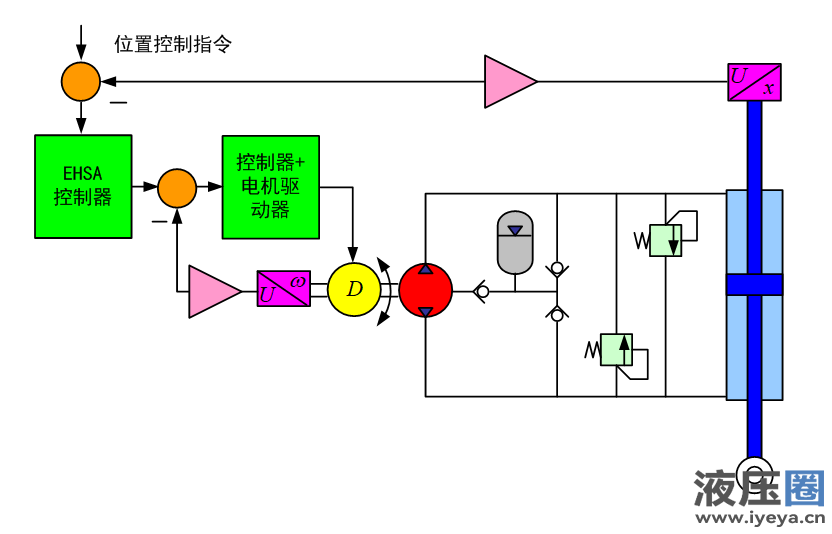
在图所示变转速泵控伺服系统中,液压泵是双向定量液压泵(即图3.14系统中变量液压泵斜盘位置固定不变,它等效于双向定量液压泵)。采用局部负反馈控制系统控制电机转速,精密驱动与控制定量液压泵转速与旋向。从而控制定量泵输出工作液流量与方向。
同样,液压泵输出工作液驱动和控制液压缸活塞杆位置,位置传感器检测活塞杆位置,并产生反馈信号,活塞杆位移反馈信号与位置控制指令进行比较产生偏差信号,偏差信号被送往电静液作动器EHSA控制器,它产生控制指令,并传给定量泵驱动与控制系统,从而构成位置负反馈控制系统。
3-5题
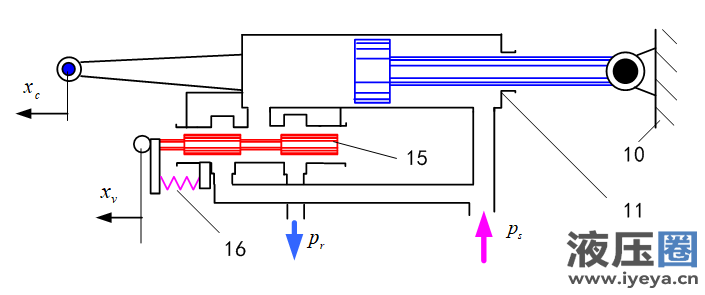
参见书第66页图3-2,参考答案
仿形车床机液伺服机构的工作原理如下:若向右推动机液伺服机构的控制阀芯。假设瞬时阀体不动,控制阀阀芯右移打开阀口,阀口将无杆腔与回油接通,无杆腔内压力降低,液压缸的缸筒右移。由于缸筒与控制阀体刚性连接为一体,缸筒带动控制阀体右移,直至关闭阀口,液压缸的缸筒停止向右移动。
反之,若向左拉动控制阀芯,假设瞬时阀体不动,控制阀的阀芯左移打开阀口,阀口将液压缸的无杆腔与供油连接,即液压缸无杆腔和有杆腔同时接油泵,液压缸差动工作,液压缸的缸筒左移动,带动控制阀体向左移动,直至关闭阀口,液压缸的缸筒停止向左移动
结构特点:
(1)仿形车床机液伺服机构构成一个独立的机械部件;
(2)滑阀为伺服滑阀;
(3)执行元件为非对称缸,与三通滑阀构成三通滑阀控非对称缸液压动力元件;
(4)阀体与缸筒刚性连接,构成反馈通道;
(5)构成反馈系统结构,构成机液伺服机构。
3-6题
参考答案
控制元件为电液伺服阀,执行元件为液压马达。将电流信号输入电液伺服阀线圈,电液伺服阀产生流量受控的工作液,驱动液压马达轴移动。位移传感器检测液压马达轴转角,并将它传给电子控制装置,与控制指令信号比较产生偏差信号,偏差信号经过放大和转换等变为控制电流,控制电流被输入电液伺服阀,上述构成位置伺服控制系统。
结构特点:
(1)电液控制系统由电液伺服阀、液压马达、转角传感器、控制器、伺服放大器、信号放大器等构成;
(2)控制阀为电液伺服阀;
(3)执行元件为液压马达,与电液伺服阀构成四通阀控液压马达式液压动力元件;
(4)转角传感器和信号放大器构成反馈通道;
(5)构成电信号反馈系统结构,构成电液伺服控制系统。
3-7题
参考答案
工作原理:
液压泵是液压变量泵,变量泵工作在固定转速下。变量泵输出工作液流量与压力受控于它的斜盘控制系统。
在变量泵的斜盘控制系统中,电液伺服阀控制非对称缸驱动变量泵斜盘控制机构,并构成局部电液伺服阀控非对称缸开环控制系统对斜盘角度进行控制,从而实现电信号调节变量泵排量,以便实现电信号控制液压泵输出工作液流量与方向。
变量泵输出工作液驱动和控制液压缸活塞杆位置,位置传感器检测活塞杆位置,并产生反馈信号,活塞杆位移反馈信号与位置控制指令进行比较产生偏差信号,偏差信号被送往控制器,它产生控制指令,并传递给变量泵斜盘控制系统,从而构成位置负反馈控制系统。
结构特点:
(1)变排量泵控系统内部嵌套了一个电液伺服阀控非对称缸开环控制系统;
(2)主回路控制元件为变量泵;
(3)执行元件为对称缸,与变量泵构成变排量泵控对称缸液压动力元件;
(4)转角传感器构成反馈通道;
(5)构成反馈系统结构,构成电液变排量泵控对称缸液压伺服系统。
3-8题
参考答案
工作原理:
液压泵是液压变量泵,变量泵工作在固定转速下。变量泵输出工作液流量与压力受控于它的斜盘控制系统。
在变量泵的斜盘控制系统中,电液伺服阀控制非对称缸驱动变量泵斜盘控制机构,并构成局部电液伺服阀控非对称缸开环控制系统对斜盘角度进行控制,从而实现电信号调节变量泵排量,以便实现电信号控制液压泵输出工作液流量与方向。
变量泵输出工作液驱动和控制液压马达轴转角,转角传感器检测马达轴转角,并产生反馈信号,液压马达轴转角反馈信号与转角控制指令进行比较产生偏差信号,偏差信号被送往控制器,它产生控制指令,并传递给变量泵斜盘控制系统,从而构成位置负反馈控制系统。
结构特点:
(1)变排量泵控系统内部嵌套了一个电液伺服阀控非对称缸开环控制系统;
(2)主回路控制元件为变量泵;
(3)执行元件为液压马达,与变量泵构成变排量泵控液压马达液压动力元件;
(4)转角传感器构成反馈通道;
(5)构成反馈系统结构,构成电液变排量泵控马达液压伺服系统。
3-9题
参考答案
液压泵是液压变量泵,变量泵工作在固定转速下。变量泵输出工作液流量与压力受控于它的斜盘控制系统。
在变量泵的斜盘控制系统中,电液伺服阀控制对称缸驱动变量泵斜盘控制机构,并构成局部电液伺服阀控对称缸闭环控制系统对斜盘角度进行控制,从而实现电信号调节变量泵排量,以便实现电信号控制液压泵输出工作液流量与方向。
变量泵输出工作液驱动和控制液压马达轴转角,转角传感器检测马达轴转角,并产生反馈信号,液压马达轴转角反馈信号与转角控制指令进行比较产生偏差信号,偏差信号被送往控制器,它产生控制指令,并传递给变量泵斜盘控制系统,从而构成位置负反馈控制系统。
结构特点:
(1)变排量泵控系统内部嵌套了一个电液伺服阀控对称缸闭环控制系统;
(2)主回路控制元件为变量泵;
(3)执行元件为液压马达,与变量泵构成变排量泵控液压马达液压动力元件;
(4)转角传感器构成反馈通道;
(5)构成反馈系统结构,构成电液变排量泵控马达液压伺服系统。