数字开关先导控制双阀芯液压阀的负载口独立控制性能研究
引用论文 Zhong, Q., Bao, H., Li, Y. et al. Investigation into the Independent Metering Control Performance of a Twin Spools Valve with Switching Technology-controlled Pilot Stage.Chin. J. Mech. Eng. 34, 91 (2021). https://doi.org/10.1186/s10033-021-00616-w 研究背景及目的 液压传动是大型装备运动控制的关键技术,被广泛运用于航空航天、军事、工农业等领域。液压阀是液压系统运动控制的核心元件,其性能直接决定着系统效率和装备运动性能。传统液压阀多为单阀芯结构,虽操控简单,但控制域度低,节流损失大,且感知能力弱、功能单一。发明液压阀新型结构并研发其多功能控制器是突破现有液压阀功能和性能瓶颈的关键。本文针对集成数字液压先导技术的负载口独立阀的创新构型设计及其负载口独立控制技术展开研究,目的在于扩展液压阀功能种类并提升液压阀控制性能,为液压系统节能和装备运动性能优化提供途径。 试验方法 创新研制了数字液压先导负载口独立阀,建立了该阀控单元的数学模型,搭建了该阀控单元的电-磁-机械-液压多领域虚拟样机模型,并开发了该阀控单元的可编程控制系统。基于两级闭环压力控制器和基于流量反馈的两级闭环流量控制器,通过仿真和实验分析了可编程阀控单元在压力控制、流量控制以及压力流量复合控制等方面的性能。 其试验测试系统如下图所示,其中NI 9505伺服驱动板卡的供电电压为30V,先导级供油压力为5-20Mpa,主阀供油压力为5Mpa。上位机用于布置各系统状态(阀芯位移、油腔压力、阀口流量)闭环控制程序,根据各状态反馈量调整相应先导高速开关阀驱动占空比,并将控制指令传输给下位机;下位机NI 9035控制器用于布置4个先导高速开关阀的FPGA程序,并根据上位机发送的控制指令(4个先导高速开关阀的工作占空比),通过4个NI 9505伺服控制模块驱动相应高速开关阀实现对应占空比的快速启闭;NI 9205数据采集板卡用于获取数字液压先导可编程阀的两路主阀芯位移信号、两路工作口压力信号以及其他系统状态,主要包括系统压力、油箱压力、油液温度和先导供油压力。 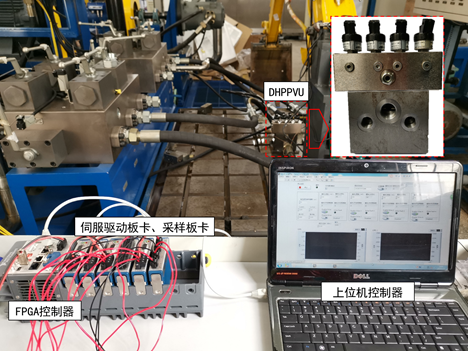 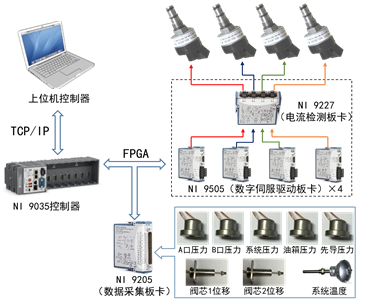 结果 数字先导新构型双阀芯液压阀的压力控制响应速度较快,但是由于其主阀芯的高频抖动,油腔压力波动现象也进一步加剧。当负载工况突变时,油腔压力能在70ms内恢复至初始状态。 数字先导新构型双阀芯液压阀具有优越的动静态性能,流量稳态误差可控制在和0.7L/min以内。 数字先导新构型双阀芯液压阀在压力流量复合控制环节具有优越的动态特性和稳定性,进油腔流量抗干扰性能较强。 将研制的数字先导新构型双阀芯液压阀应用到挖机臂负载中,开展了阻抗工况和超越工况下的压力流量复合控制研究。结果表明其控制性能优于传统比例阀控制效果。 结论 本文提出了一种将负载口独立控制技术与数字液压技术相结合的新构型双阀芯液压阀。基于对先导级高速开关阀的开关控制,实现了对主阀芯的位置控制,并进行了压力和流量的阶跃响应测试以及压力和流量的稳定性测试。此外,进行了挖掘机动臂油缸在伸展和缩回过程中的动态性能测试。实验和仿真结果表明,与传统的比例阀和比例先导双滑阀芯液压阀相比,基于本文提出的数字先导新构型双阀芯液压阀的负载口独立控制系统在不同工况下表现出更快、更稳健的动态性能。 前景与应用 负载口独立控制技术和数字液压技术是当下流体传动与控制领域的研究热点。本文将两种技术集成于一个阀上面,扩展了液压阀功能种类并提升液压阀控制性能,为液压系统节能和装备运动性能优化提供途径,具有广阔的工程应用前景和重要的学术研究价值。试验和仿真结果证明了本文提出的数字先导新构型双阀芯液压阀在挖掘机上以及原理相似的其他移动工程机械应用的巨大潜力 相关文章/图书推荐 [1] SitteA, J Weber. Structural design of independent metering control systems. ScandinavianInternational Conference on Fluid Power, 2013. [2] Chen G,Wang J, Wang S, et al. Indirect adaptive robust dynamic surface control inseparate meter-in and separate meter-out control system. Nonlinear Dynamics,2017. [3] Ding R,Bing X, Zhang J, et al. Self-tuning pressure-feedback control by pole placementfor vibration reduction of excavator with independent metering fluid powersystem. Mechanical Systems and Signal Processing 92 (2017): 86-106. [4] ZhangX, Qiao S, Quan L, et al. Velocity and position hybrid control for excavatorboom based on independent metering system. IEEE Access 7 (2019): 71999-72011. [5] Wang S,Zhang B, Zhong Q, et al. Study on control performance of pilot high-speedswitching valve. Advances in Mechanical Engineering, 2017, 9(7). 团队带头人介绍  杨华勇,流体传动与控制领域专家。重庆人。1982年毕业于华中工学院(现华中科技大学)获学士学位,1988年毕业于英国巴斯大学获博士学位。2004年获国家杰出青年基金项目资助,2005年受聘为浙江大学“长江学者”特聘教授,2007年和2012年两任“973”项目首席科学家。现任浙江大学教授、浙江大学机械工程学院院长。2013年当选为中国工程院院士。 杨华勇院士近30年来一直在教学科研一线,先后主持了国家重点基础研究发展计划(973)、国家高技术研究发展计划(863)、国家自然科学基金、国家科技支撑计划等项目50项。他长期从事电液控制方面的理论研究、基础元件和系统开发、盾构与液压电梯关键技术研发以及工程化等工作,突破了盾构压力稳定性控制、载荷顺应性设计和姿态预测性纠偏基础理论与关键技术,攻克了掘进过程失稳、失效、失准三大国际难题,研发出土压、泥水和复合三大类盾构系列产品,使我国进入盾构技术先进国家行列;攻克液压电梯速度与位置精确控制、势能高效回收关键技术难题,形成国际领先的自主液压电梯核心技术;提出新型平衡阀设计新方法,研制了样机并实现了工程应用。 杨华勇院士科研的探索创新工作获得多项奖励:其“盾构装备自主设计制造关键技术及产业化”获2012年度国家科技进步奖一等奖,“电液比例节能型电梯液压速度控制技术”获2003年度国家科技进步二等奖。2013年获何梁何立科学技术奖。  钟麒(博士),浙江工业大学机械工程学院副研究员、浙江大学博士后。 现为中国机械工程学会高级会员,中国机械工程学会流体传动与控制分会智能流控专业委员,中国机械工程学会流体传动与控制分会青年工作委员会委员。主要从事数字液压技术和液压元件可编程控制技术方面的研究,主持了国家自然科学基金、中国博士后科学基金特别资助项目、浙江省领雁计划项目等国家级和省部级项目7项,曾获得中国青少年科技创新奖、上银优秀机械博士论文奖铜奖、浙江省优秀博士学位论文、浙江大学优秀博士学位论文。 团队研究方向 智能流体传动与控制,具体包括数字液压基础理论与应用、高性能液压基础件研究、高端机电液装备研究、生物制造关键技术与装备等。 团队发表高影响力论文 [1] 钟麒,何贤剑,李研彪,张斌,杨华勇,陈波.自适应供油压力变化的高速开关阀控制策略研究[J].机械工程学报,2021,57(06):224-235. [2] 钟麒,谢耿,汪谢乐,李研彪,杨华勇,张斌,陈波.多电压复合驱动的高速开关阀性能研究[J].机械工程学报,2021,57(04):191-201. [3] Zhong Q, Zhang B, Bao H M, et al. "Analysisof pressure and flow compound control characteristics of an independentmetering hydraulic system based on a two-level fuzzy controller." Journalof Zhejiang University-SCIENCE A 20.3(2019):184-200. [4] Zhang, B., Zhong, Q., Ma, J. E., Hong, H. C., Bao, H.M., Shi, Y., & Yang, H. Y. (2018). Self-correcting PWM control for dynamicperformance preservation in high speed on/off valve. Mechatronics, 55, 141-150 [5]钟麒,张斌,洪昊岑,杨华勇. (2018). 基于电流反馈的高速开关阀3电压激励控制策略. 浙江大学学报(工学版)(1),8-15. |

会员评论