伺服阀的关键性能参数详解
作者:Jack Johnson 翻译:郑 佩 虽然它比您通常在阀门制造商的技术文献中看到的内容更详细,但Fig.1图中揭示了几个关键的阀门操作特性: 开启电流opening (cracking) current 死区宽度width of the dead zone 流量饱和saturation flow 流量增益flow gain 线性度linearity 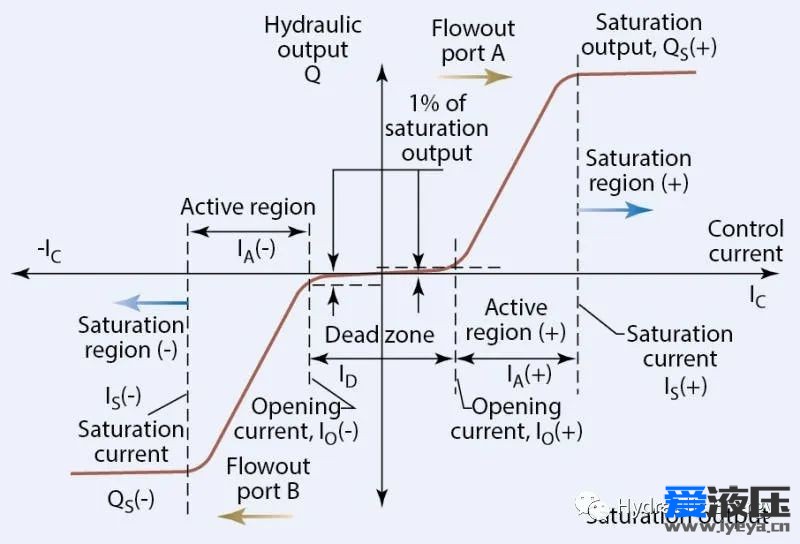 Fig.1恒压无负载工况下通用比例阀的流量特性 阀开启点是阀刚开始打开的那一刻。这似乎是一个简单明了的陈述,但事实并非如此。由于滑阀始终存在泄漏,因此流量变化会发生在整个阀的遮盖区域或死区。(死区是存在于两个开启点之间的非常低流量的区域,死区也有内泄)。 因此,有知识的人必须就多少输出流量构成阀门开度达成一致。ISO 10770-1提供了一个设定国际标准值的机会。然而,该文件的制定者选择了权宜之计和避免启蒙运动的争议,什么也没说。 密尔沃基工程学院是几年前一个工业研究项目的受益者,该学院将阀门开启的条件定义为“输出流量上升到全转换流量的1%的点。”这是一个很好的定义,因为它是基于滑阀的实际特点。有了它,可以定义更多的参数。 额定流量可以从图Fig.1的流量曲线中确定,只要供油压力设置并保持在阀门的额定流量压力: QS=QR÷PS,T=PS,QR PS,T绘制流量曲线时的供油压力,以及PS,QR是用于额定流量的供油压力。 对于伺服阀(ISO 10770-1),标准测试压力为7 MPa (1015 psi)。比例阀测试压力为1MPa。ISO 10770-1的公式制定者本可以定义伺服阀和比例阀,但他们没有这样做。相反,他们通过指导读者在7 MPa或1 MPa下测试,“视情况而定”,避免了争议和责任。因此,比例阀和伺服阀之间的差异不是基于性能差异,而是基于进行流量测试时的压力。 增益(Gain) 流量增益是输出流量相对于输入电流变化的速率(导数,GQ=dQ/dI)。无负载压差时: 对于非线性阀,建议确定平均的流量增益。不幸的是,有几种方法来定义非线性阀的平均流量增益,所有这些方法产生不同的值。 另一方面,流量增益不是一个非常重要的阀门参数。这是因为在应用中阀的压降总是在变化。因此,流量增益总是在变化。 执行器相对于阀门输入电流的速度增益则更重要。由于流量和压降之间的平方/平方根关系,流量增益可以在测试压力下进行评估,而不是额定流量压力。此外,流量增益可以针对除额定流量压力之外的压力进行计算:  其中: GQ,APP是应用中的流量增益 GQr是在额定压力下运行时从额定流量获得的流量增益。 PS,APP是应用时的供油压力 PSQR是用于确定阀门流量的测试压力 伺服阀的用户和制造商经常引用流量增益,有时比例阀也引用流量增益。然而,它的重要性被夸大了。一个更重要的系统参数是速度增益,这与应用相关。它考虑了阀门的流量增益、执行器尺寸或排量、执行器上的负载和供油压力。相比之下,流量增益只是一个阀门参数,它只在特定的供油压力下有效。此外,流量增益不考虑应用中的大量变化,例如执行器尺寸、负载和供油压力。 线性还是非线性?( Linearity or non-linearity) 技术文献总是报道阀门流量特性的线性度。实际上,它正在评估阀门的非线性。例如,一种流行的伺服阀被列为“线性度小于3%”,如果阀门只有3%的线性,那么它必然有97%的非线性。这是难以想象的!显然,这不是阀门制造商在表达线性时的意图。这意味着该阀3%是非线性的,因此97%是线性的。 一个更重要的阀门参数是死区。具有较大死区的阀在寻求零作为最终操作条件的应用中是无用的,例如在位置控制和一些压力控制系统中。不幸的是,在模拟和数字阀门控制器中普遍使用的电子死区补偿器虽然有所帮助,但永远不能真正补偿阀门重叠。 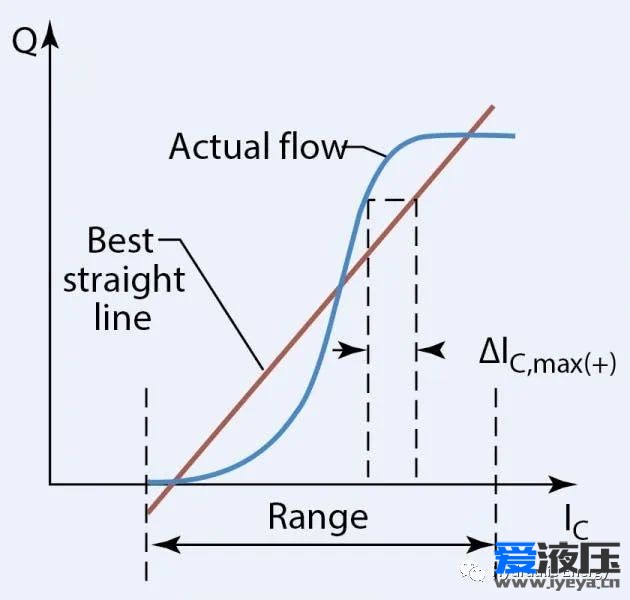 Fig.2 线性度是通过找出指定范围内实际流量曲线与数学上最佳直线之间的最大偏差来确定的 本质上,线性是流量曲线与最佳拟合直线的一致程度,如Fig.2所示。线性是次要的,它很容易被人为修改。为了拟合和比较直线,必须定义拟合应用的范围限制。在Fig.2中,直线的极限被选为名义上阀门的有效测量区。基于流量曲线和直线之间的最大偏差(偏差越小,线性越好)的评估将产生比直线绕两条曲线的交叉点逆时针旋转更高的值。 另一方面,如果直线通过原点,则会导致更高程度的非线性。标准报告,如ISO 10770-1,对如何测量和报告非线性完全保持沉默。 滞环(Hysteresis) 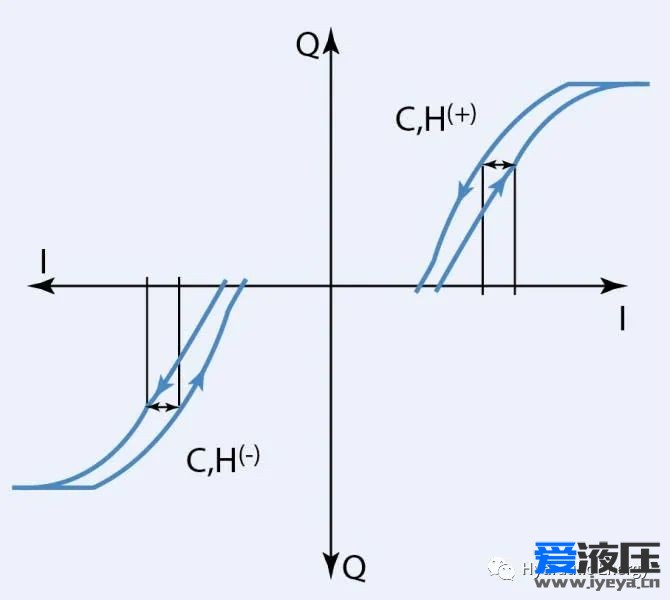 Fig.3通过比较上升和下降曲线发现滞环 对于比例阀来说,滞环是输入增加时的特性曲线相对于输入减少时的特性曲线之间的最宽水平间距相对电流的百分比。这个想法在Fig.3中给出,用于具有较大遮盖的比例阀。请注意,对于具有遮盖的阀门,将对A口输出流量和B口流量输出两者的最大值水平间距进行评估。然而,delta增量值除以负饱和与正饱和之间的总电流差(Fig.1定义了的值IA(+)和IA(-)应用于以下公式):  对于一个零遮盖伺服阀,评估滞环的方法稍微简单一些。流量特性的正流量部分和负流量部分之间没有区别。增加和减小电流,扫描整个流量曲线,记录最宽的水平间隔,滞环计算如下:  其中IC,H是在流量曲线上任何地方发现的递增和递减输入特性之间的最大间距。 分辨率(阈值threshold) 分辨率试图将由摩擦引起的阀磁滞部分与由力矩马达内部铁磁部件的磁化特性引起的阀磁滞部分分开并进行测量。在这方面,分辨率表示当所有磁效应都被消除时的最小可能磁滞。事实上,当以循环和递减的方式接近磁力线上的一点时,磁滞大大减小,这是铁的特性。现在,当一个伺服回路被调整为高增益时,零点就可以以这种方式接近。因此,伺服回路的最终精度由分辨率而不是滞环来评估更好。此外,每当积分控制(例如PID控制)在回路中带有滞后时,伺服回路将表现出增益调节不能消除的低水平、稳定的振荡。这种情况称为极限环,是某些应用中不应使用积分控制的众多原因之一。 分辨率的测试很难进行,并且受操作者技术和用于测量的仪器的灵敏度的影响。分辨率被定义为实现流量增加逆转所需的电流变化除以阀门额定电流的比值。对于伺服阀,典型值约为0.5%。很明显,分辨率测试不是在重叠阀门上进行的。 有关该主题的详细信息,包括公式推导,请参见《Designer's Handbook for Electrohydraulic Servo and Proportional Systems》,作者Jack L.Johnson,P.E. o order.  |

会员评论