迎接中国液压的新时代-王长江
迎接中国液压的新时代 ——据中国液压气动密封件工业协会专家委员会副主任王长江报告整理 我报告的题目叫做液压的新时代,告诉大家怎么个新法,到了一个新时代,如何面对这个新时代。大概有四个部分,以数字孪生作为主要的一个工具,来讨论一下我们液压的几件事情。 数字孪生-产品迭代发展的重要手段首先讨论一下很时髦的数字孪生,为什么要讲数字孪生,是因为数字孪生是产品迭代发展的一个重要阶段。我国工程机械、行走机械发展得非常快,我们的主机厂徐工、三一的销售额都已经是世界的前三、前四名了,但如果我们看另外一个数字,我们就感觉到还有很多事情要做。 2020年我国工程机械出口总额188.9亿美元,只占世界市场的12.6%,就是说我们主机厂主要的产品都卖给我们中国自己。我们为什么不能占领世界市场,我们有哪些地方做不到,我们可以从这个图上看到有几个需要解决的问题(见图1)。第一是排放,双碳现在是最时髦的名词,但是从我们国家来看,2022年实行国四标准,而国外两年前就已经实行了Tier4标准了,所以人家用这个Tier4标准来衡量我们的工程机械,超标、排放都有问题,效率也低,它就没法用。第二是需要解决节能的问题,其实“双碳”是两个概念,不光是排放,而且包括节能,我们在节能的问题上大概跟国外有10%~20%的差距。比如说现在大量使用的叉车、装载机都有这方面的问题。第三是技术问题,我们的电液系统非常落后,这是我们的一大弱点,另外我们没有重视大数据的使用。第四是服务,我们怎么做好远程服务,比如说世界比较领先的那些国外液压公司,早已经开始做远程服务了,远程服务的概念不只是故障服务,而是从原创设计的时候就开始做远程控制。第五是网络,我们中国是世界网络大国、5G技术的产生地,是不是想到了网络该怎么用? 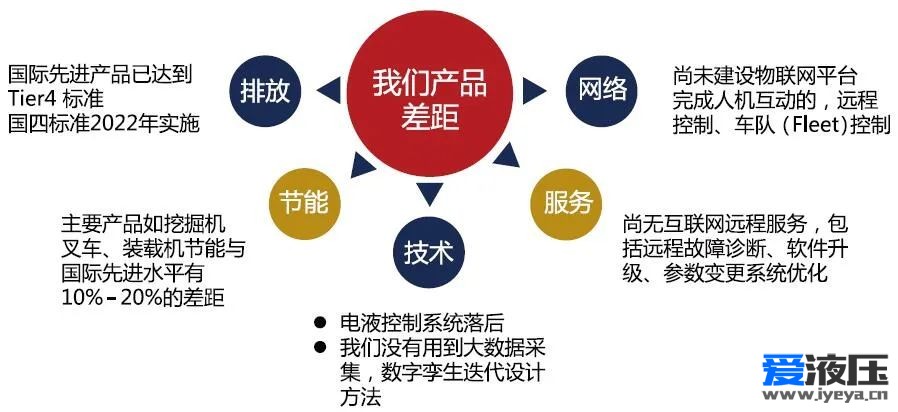 图1 我国工程机械产品需要解决的几个问题 那么有这些问题,我们就在想,促进中国液压技术的发展,很大程度上靠加快它的迭代进程。我们中国的液压想进步,你拿什么去进步呀?人家的元件为什么要改进设计,如果你没有足够的数据,没有通过迭代来找到这个问题所在的话,很难谈进步,那是空的。但是我们找到了又怎么办呢?没有理论基础,理论基础毫无疑问是需要通过仿真来解决的,那么我们现在的仿真基本上给的是方向,很难给一个定量的东西,这是我们需要着急解决的。所以未来我们可能要从根本上去解决工程机械仿真的事情,未来的主机都是电子输入,以它作为变量,产生的运动控制函数是什么?我们把这个函数又作为变量,输入给做机械动力学仿真的人,通过仿真计算出功率的强度、臂架还能不能减轻重量,以此来提高我们的产品质量。 举一个最简单的例子,现在工程机械凡是有臂架的东西都碰到一个非常头疼的问题,就是平衡阀。大家可以看到这是最简单的一个平衡阀(见图2),这个平衡阀如果从控制的角度来分析的话,发现它就是用了液压的PID来完成它的平衡阀的功能。液压的PID一旦出厂设定以后,这个机器卖出去了,这时PID能够智能吗?比如说温度上来以后,如果还是原来的PID,就可能会产生振荡;比如说温度很低,如果还用原来的PID,平衡阀就打不开,重物就掉下来了。 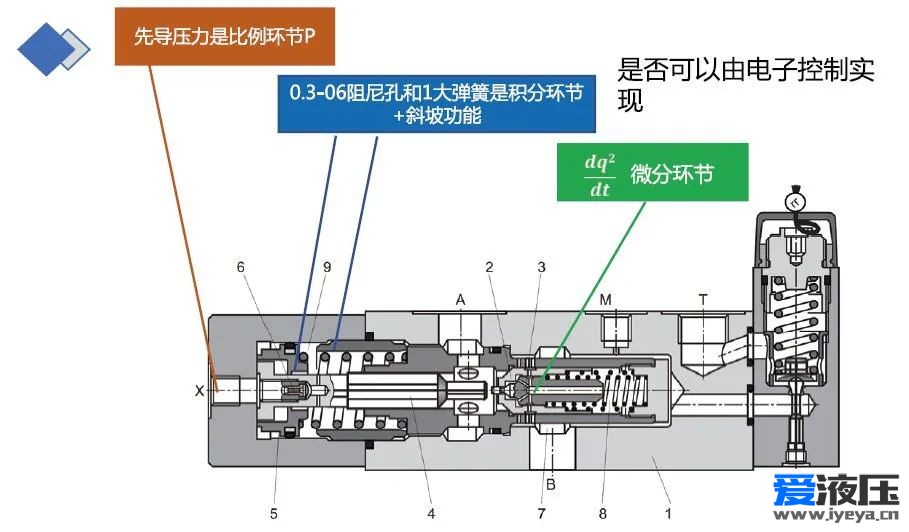 图2 平衡阀 另外平衡阀要真正满足主机的需求,会有若干的特性曲线的要求、静态的要求。比如说斜率是多少,同一个阀在不同的工作阶段上,能否设置不同的斜率、增益,这些都是液压完不成的,所以常常因为平衡阀而出现重大问题。用什么方法能解决呢?一定要用智能的PID,一定要把它改成电控的。所以我们的液压没有电控真是非常危险的。 再看一下挖掘机用的柱塞泵,现在的柱塞泵很简单了,它没有恒功率控制系统,没有液压的流量控制系统,也没有压力切断控制系统,现在的柱塞泵用一个比例电磁铁就把一个泵的压力、功率、流量全部都控制了,挖掘机已经这样了,但是我们现在研究泵的、做泵的有没有提高到这个意识上,这是值得我们思考的。 所以用好仿真是我们目前迫不及待要解决的问题。现在的仿真平台并没有做过认真的迭代,它和真实的情况有一定的差距。那么怎么能让仿真平台做的好呢?除了要做建模以外,还必须通过不断的辨识来迭代你建的模,一直修整到这个模可以实际应用。我们现在的仿真方法解决不了这件事,我们必须考虑仿真与被仿的实物之间的通讯问题,这就是我们需要用数字孪生的一个原因。 现在如果产品有问题,从商讨改进、修改工艺,最后产品设计、试验、上车对工程机械来讲没有一年的迭代时间是解决不了的,我们希望把这个时间缩短到三个月,怎么办?我们当然想到了数字孪生。数字孪生是个工具,我不是干数字孪生的,我也不懂数字孪生,但是我可以把数字孪生当成一种工具,通过数字孪生就能让现在的仿真变为可以用的仿真。大家说为什么要用仿真,因为如果仿真跟实际非常接近的时候,我们就能从仿真上拿到数学模型,只有有了数学模型才能做出电子控制的软件,我们现在的软件大部分都是logic control,并没有做到motion control,而未来的发展,工程机械要会做motion才行。谁会做这样的软件,它的理论基础是什么,所以我们急需要迭代发展。 谈到数字孪生的时候,我们要考虑二个问题。第一,我们不是干数字孪生的,是用数字孪生的。第二,数字孪生这个概念其实有多个维度。 ● 模型维度。我们使用几何模型(产品及其零部件)、物理模型(Motion Control)。并不以虚拟的一些东西作为对象。那么模型的精度不够,我们就要通过迭代让你的仿真系统达到一定的接近实际的精度。 ● 连接维度。现在来看目前的仿真没有和实际建立很好的关系,他们没有互动的概念,未来我们可以建立一个IOP的平台,然后让仿真和实际在建模的过程、边界条件、在迭代上都能实现互通的作用。 ● 使用维度。第一步“虚拟-现实”加快产品迭代发展;第二步促进电子软件创建与发展;第三步运动解耦控制:端云协同、控制合一。 ● 物理维度。大家都认为数字孪生跟仿真有关系,其实不仅仅跟仿真有关系,数字孪生完成可以物理对物理,物理对试验台。现在一个阀装在主机上,实验台也有同样的阀,试验台试验的曲线和你主机实验的结果不一样的话,孪生出来,我们就能找到什么地方有问题。 ● 费用维度。这是当前一个极大的障碍,比如高校给起重机做个仿真,要50万到80万,他连自己最基本的消费都不够,但是主机厂觉得一个仿真要这么多钱。我们现在想到了一个办法,叫做可持续发展的收费办法,一会儿给大家介介绍。 ● 安全维度。如何保证使用者数据安全、数据共享的范围控制。仿真其实不只是虚拟和现实的仿真,实际原件可以跟仿真平台,试验台可以跟仿真平台、主机跟仿真平台都可以用不同的维度来实现仿真。 昨天我在高校展台上看到二个非常好的东西,一个是北理工的可视化泄漏检测技术及仪器,另一个是燕大的便携式液压有源测试方法及设备。大家可能没有想过,如果把这两个东西搁在仿真、孪生平台上的话,可以解决两件事情。第一测量点的拓扑设计,第二测量数据的辨识应用可深度优化系统。 毫无疑问,未来任何一个液压系统的关键点都是闭环控制,那么怎么把闭环做好?大家可以看到现在平衡阀已经开始用电控的平衡阀了(见图3),什么叫电控的平衡阀,就是它的压力信号不来自于吸空的那个油缸上腔,油缸上腔的压力传感器经过滤波、经过电子运算以后再决定应该怎么做。而现在的平衡阀开启取决于油缸上腔压力,压力高了就打开,一打开压力就低了,然后又关上,所以实际在不断地开关、开关,很难做到运动的平稳。因此我们就想未来液压系统、液压元件结构的改进,动力系统的改进,操作系统的改进,都要有强大的理论基础,而这理论基础恐怕是应该来自于真实的仿真。 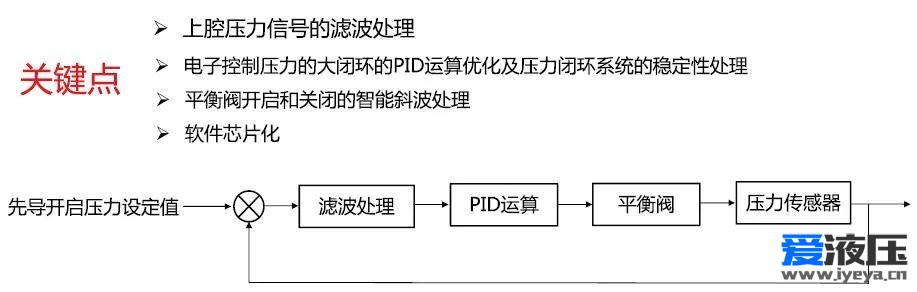 图3 开发电子控制平衡阀 数字孪生-产品液压电子控制软件设计现在的新时代碰到一个很大的问题,与国外元件相比,中国的液压元件现在已经基本不存在可靠性差的问题了,因为我们大部分的液压元件都是自动线加工的,一致性没有问题。但是我们的液压有个明显的最大的差距——不带电控,基本上没有动用电子控制。但是当讨论到碳中和、碳达峰的时候,我们恐怕要用电控了。比如说除了挖掘机以外,大家从来没有考虑过工程机械的节能问题。实际上挖掘机的节能与其他工程机械是一回事,就是如何让液压系统和柴油机能够最理想地匹配起来(见图4),这是我们现在要研究的。而这样的研究不仅仅是在挖掘机,应该在所有的机器上。 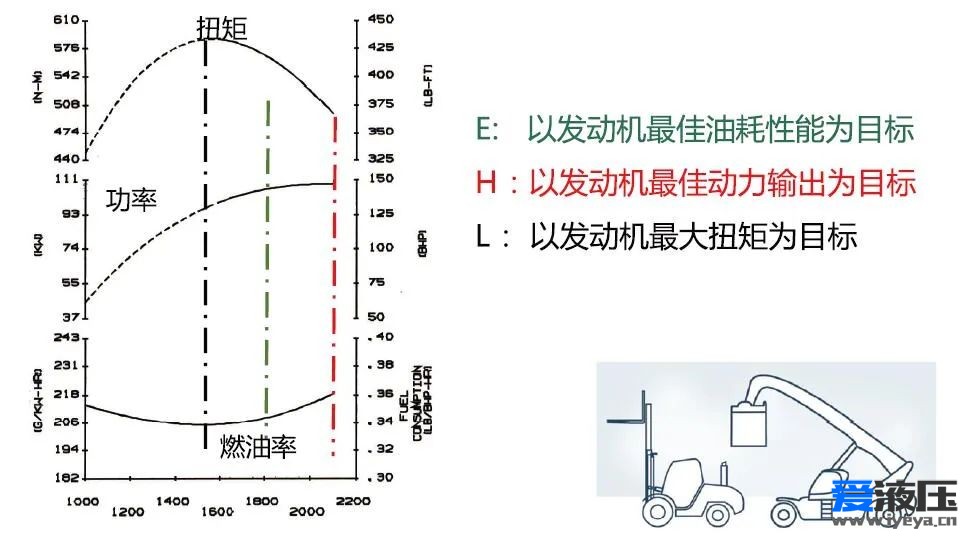 图4 液压系统与发动机的匹配 液压系统与发动机匹配的问题,比如说有的厂家做了一个挖掘机的泵,把排量增大了,但实际工作用不了这么大流量,他就降低柴油机的转速。转速下降、排量增大,一样能满足流量,但是错了,因为当转速下降以后,很可能会匹配到一个错误的点上。你可能匹配到了柴油机的最大扭距点,最大扭距点是当柴油机突然有了载荷以后,它能够不冒烟的,如果你把液压系统匹配到这一个点了,突然载荷来了,只能冒黑烟。所以我们有很多工作绝对不是一个简单的液压问题,我们需要做很多的工作来解决这件事情。 中国液压在进入新阶段的时候,大家该去做些什么工作?第一我们要想办法帮助中国的行走机械走向世界市场;第二我们要考虑一个问题,液压控制已经从速度控制转为压力控制了,我们过去都讲速度环,还做一个电子控制,用个PLC就能解决,当你改成压力环的时候,PLC解决不了了,谁来解决这个问题;第三国外电子控制已经产业化了,我们还没有做到;第四网络控制时代已经全面开始,国外做网络控制用的是telematics通讯系统,这是GPS当中的一个功能,我们中国用的GPS不具备telematics功能,但是我们有5G呀。 刚才谈到世界液压最大的变化是从速度控制系统转入到了压力控制系统,大家看这一个柱塞泵和一个液压马达(见图5),我们过去控制这个变量泵无非用软件和PLC,给它一个电流,就有一个摆角,就有一个流量,这流量有什么作用,给机器带来什么?我不知道。我们的系统未来只有一个压力传感器,没有流量传感器,整个系统是在控制机构的压力扭矩,而不是控制流量和速度,这是很大的一个变化。 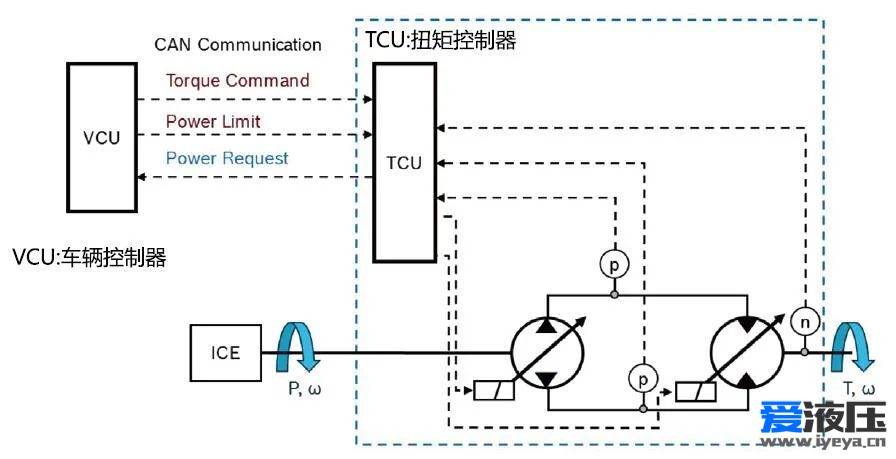 图5 泵和马达 有了这个变化以后,就有二次调节的概念,不仅泵在调节,马达也调节,这时候马达并不仅仅是调速用的,实际是调扭矩用的,速度和扭矩作为两个坐标,我们既可以调扭矩,也可以调速度,可以正扭矩、负扭矩,负扭矩、正转速,它有若干个组合(见图6),这都是我们现在的液压系统没认识到的,或者你的软件没认识到。 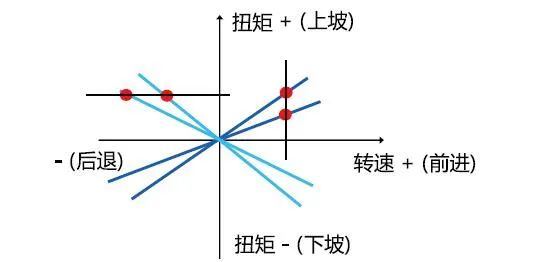 图6 二次调节系统可以工作在4个象限 大家看看力士乐过去的变量泵(见图7左),这里有一个机械反馈,给它一个电流,让它出50%的油,这是一个闭环系统。新的泵什么样,大家看看,新的泵只有两个比例减压阀(见图7右),根本没有反馈了。所以我们看到未来工程机械的液压一定要从速度控制环进入到压力控制环,也就是要控制加速度,当你要控制加速度的时候,就需要仿真的物理模型,没模型软件都做不出来。 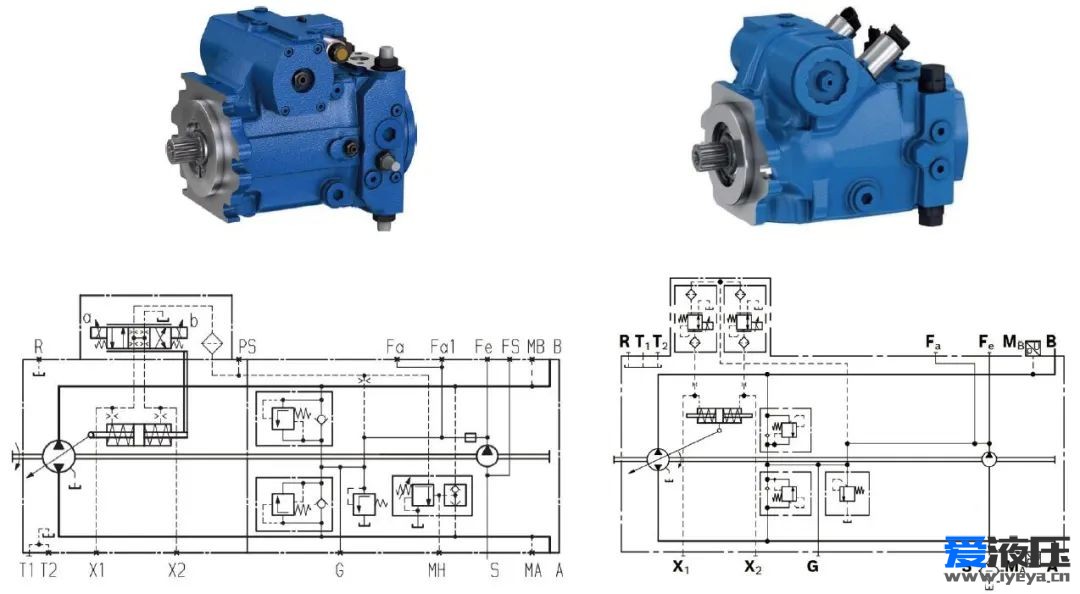 图7 老式泵和新式泵 未来的开式泵就是一个比例减压阀控制完成,但要靠三通流量阀来放大这个信号(见图8),这时我们想到一个问题,这样的一个泵在不同的温度下,泄漏量不一样,开口量不一样,开口形状不一样,这么诸多的事情都跟软件有关系,主机还能做吗?做不了,必须谁的液压件,谁来做这个软件。 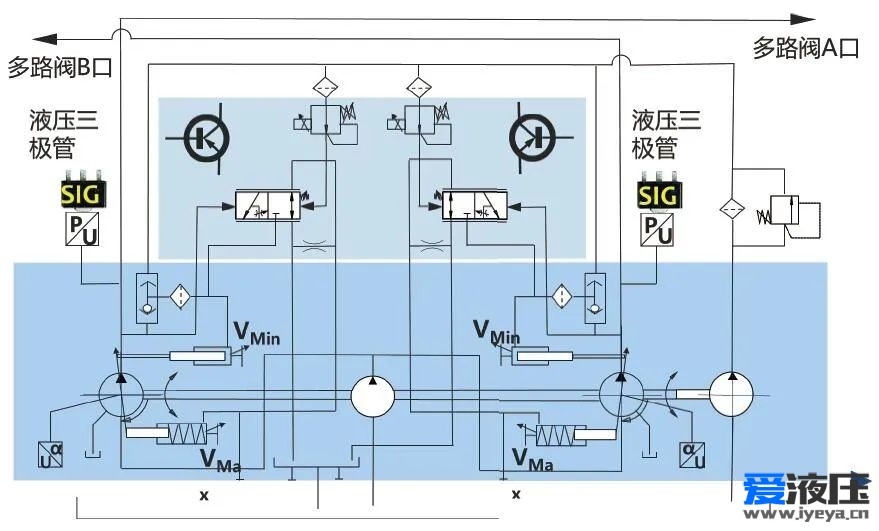 图8 未来的开式油泵 所以我们就发现未来要上电控,我们应该考虑到要从一个PLC的逻辑控制进入到一个Torque 控制,这是现在最时髦的话。比如大家都谈液压被EHA取代了,你担心EHA取代液压吗?EHA控制速度确实很好,但让EHA控制扭矩、控制压力,它没法做,因为伺服电机的转速怎么变成压力信号,怎么控制压力?那里有诸多的难点需要解决。 大家再看马达,当一辆车、一台卷扬机启动的时候,你希望马达在最大摆角还是最小摆角,当然是最大摆角了。扭矩最大最符合要求了,但是现在的液压控制做不到这一点,必须改成电控。 所以未来我们不是简单的去谈仿真平台,而是需要给出系统数学模型,数学模型变物理模型,物理模型变成软件,然后最后实现控制,这样一个过程是我们液压发展必须要考虑到的。 数字孪生-未来实现自动控制未来怎么样实现自动控制?我给大家讲讲我们的看法,就是创建行走机械电子控制新概念。什么叫新概念?我们现在的电子控制大部分是逻辑控制系统,未来我们要实现单轴最佳运动控制(启动-加速-制动),比如说需要一个缸、一个马达进行运动控制,包括加速度,包括制动;另外要多轴进行解耦;第三合理分配流量以达到节能的目标。这些都不是靠现在简单的软件能解决的,未来油缸不是位置控制,而是要通过泵的压力实现压力闭环控制;多个油缸的解耦控制现在还没有做。这些都需要我们想办法解决。 2017年我就想到了一个名词,叫云地同步,我们复杂软件搁在云里不挺好吗?大家说,您这想得太超前了。到了2020年,我在山河智能讲课,有一天早晨看到有一条新闻说:华为最近提出了一个新概念,叫“端云协同 控制归一”。端云协同和控制归一就是主机的电控系统不需要发生什么变化,已经够用了,因为是当放大器来使用的。所有复杂计算都搁在云里去算,算完了以后通过云给到你的地来完成这个工作(见图9)。 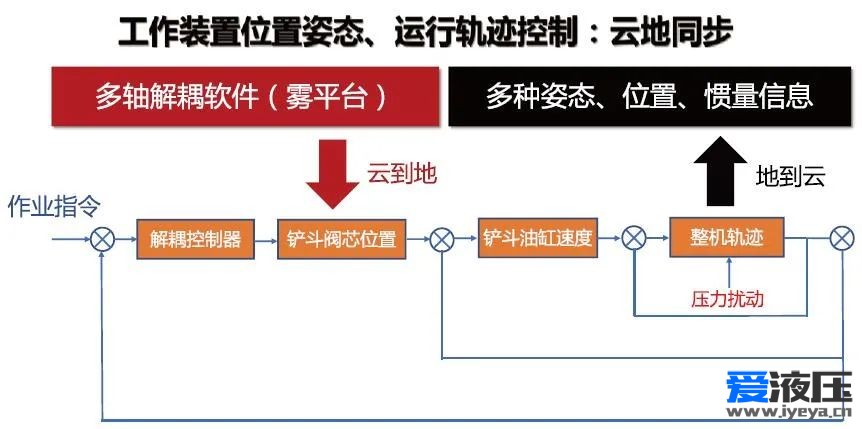 图9 云地同步 2016年5G出来以后,在讨论5G对工业有没有价值的时候,试验就做完了。试验很简单,在机器人上搁一个球(见图10),机器人上坡下坡、左转右转、刹车,球不能掉下来,这当然需要机器人不断进行调整控制。那么工业4.0的倡导者就向华为提了一个问题,如果现在把这个大的服务器搁在云上,你能不能控制这个机器人?如果能,我就信5G,推5G。试验的结果非常好,完全可以做到,根本不用再带计算机、不用带服务器了,所有功能试验下来都非常理想。 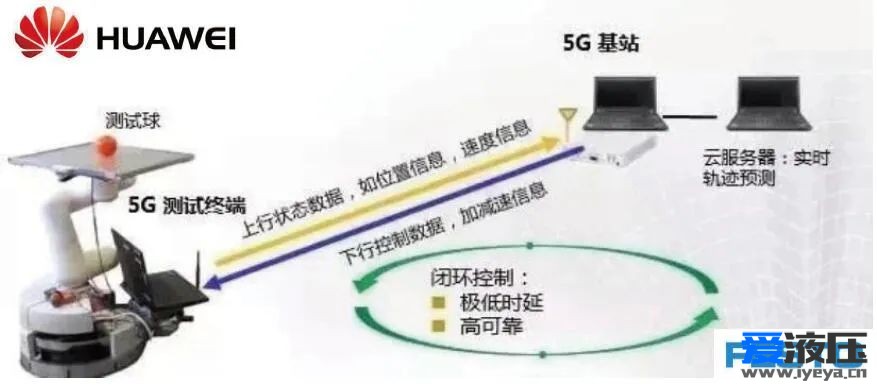 图10 云-地同步最成功的例子 下面,我们通过几个方面来讲讲我们为什么要做这件事情。 ● 建立网络控制概念(见图11)。未来的系统不需要把复杂的运算、泵的压力控制,马达的压力控制、多路阀的控制等等都搁在机器上,我们会做一系列的标准控制软件,把它搁在云里,愿意用就从上面下载下来,就可以用了,这和我们现在查健康码、行程码不是一回事吗?然后机器上全都是驱动器,咱们过去管他叫放大器,机器的电控并不复杂,因为它只要拿到了云给它的计算结果以后就知道该怎么做了。另外我们也可以把机器的运行不断地通过传感器报告给云,云再根据这个数据来做新的运算。 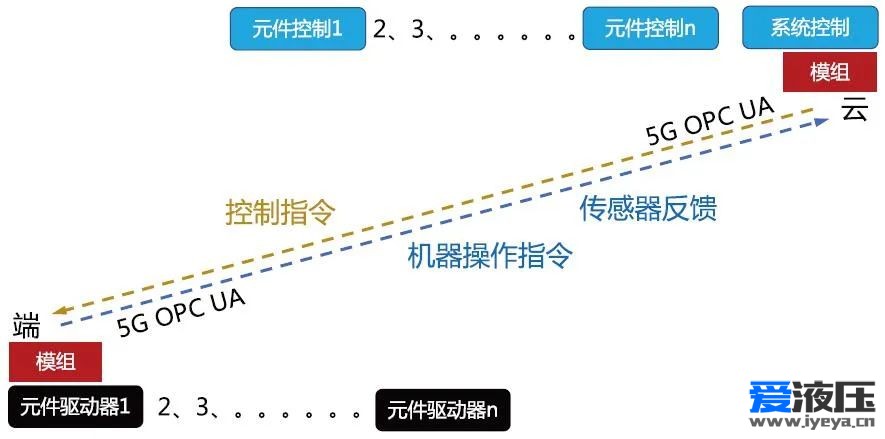 图11 建立网络控制概念 ● 建立行走机械控制云平台(图12)。未来我们要考虑能否建立一个液压行走控制云平台,这个云平台干什么?要把模块化的软件库、系统的控制方式、远程的服务都给解决了,彻底解决拿到机器操作的指令以后,我们就会进行运算,运算出来就会给端一个指令,端的指令会把运行的结果通过传感器传回到云,用云地同步的方法来解决。大家不要担心速度,5G是可以做到1ms延迟性。当然,它有个条件就是节点密度,一平方公里不能超过100万个点,这个问题怎么解决,一会儿再给大家讲了。 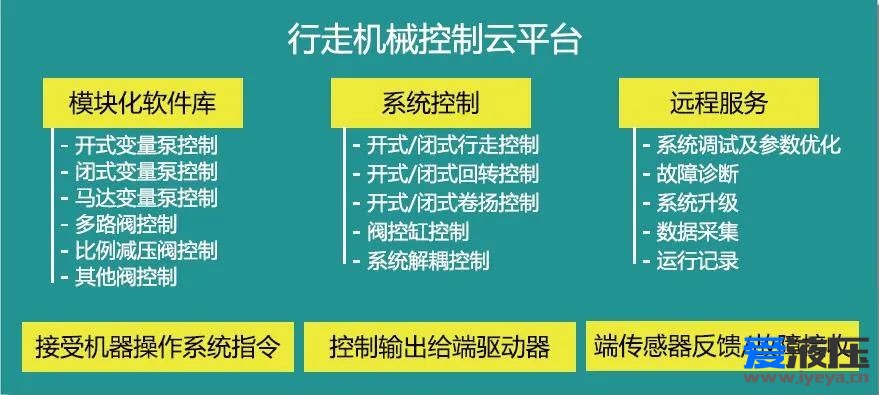 图12 建立行走机械控制云平台 ● 未来我们在机器上做液压的OBE(On Board Electronics)它是装在机器上的在线控制器,其控制扫描时间可控制在1ms,完全可以实现压力控制。其设定指令可以通过OPC-UA来传递指令,在车上实现CAN总线控制。 ● 模块化软件库。我们将在云里建立若干个标准软件,比如说泵的恒功率控制,马达、阀等元件控制都会做标准软件。现在的软件有液压厂做的,也有主机厂做的,主机厂都是各自做各自的,它们都没有达到最佳的软件。windows到现在还在迭代,我们做的软件谁迭代过,大家觉得功能到了就行了,但是未来的系统功能只是到了是不行的,必须是最佳的,所以软件要不断进行迭代。另外我们要把大量的解耦都搁在云上面,比如说挖掘机怎么做3D、2D,农业机械怎么做犁深系统,这些都需要非常复杂的软件来完成,我们管它叫解耦控制。现在我们的硬件、软件、电子的没有做解耦控制,是靠人来解耦。这是我在美国开的一个挖掘机(见图13),我没开过挖掘机,上去就能开,就能保证拉平,就做到了2D,现在2D已经不时髦了,3D都有了。  图13 傻瓜式挖掘机 ● 应急控制器。这种端云同步的方法可靠吗?5G能保证吗?万一断了线,万一没信号,怎么办?没关系的,我们可以在有信号的地方把软件下载到专门的控制器上,然后由控制器输出给各元件驱动器。 ● 优化、调试、服务。现在很多公司都说我有云平台,但实际我们没有做到系统配置、系统调试、参数设定,仅仅做在一个故障排除上,软件也没有升级。 ● 大数据。未来我们会用大量的大数据,这个大数据不仅仅为了服务用户,大数据可用于机器自身的迭代发展,包括它的各种运动轨迹,都会通过不断地迭代产生一个最好的零件。 未来工程机械可以实现挖掘机铲斗的轨迹控制和推土机推土铲的姿态控制,按六个自由度(6DOF)的控制模式,国际上已成功地进入了工业化和商品化的阶段。那么这就需要建立新的系统,当然毫无疑问要用大量地使用5G技术。德国工业4.0的倡导者FRAUNHOFER,过去在谈工业4.0的这个概念时候是左边这个图(见图14),当有了5G以后,它就加了一块图,这块就是OPC UA,常用的工业标准都纳入了OPC UA,见图14右边。 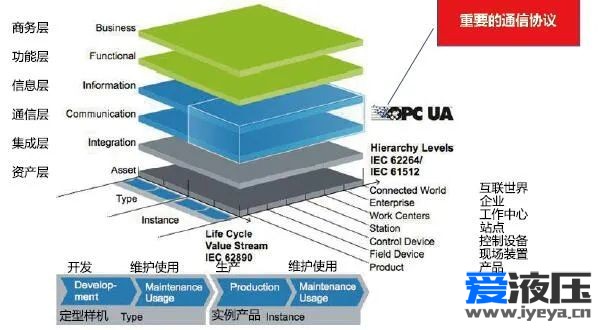 图14 工业4.0 的整体3个维度构架 刚才讲过OPC UA是华为与各种控制公司联合创建的一个平台,当时创建这个平台的时候,很多工业标准包括CAN总线也都加入进来(见图15)。那么看这个平台的发起人,博世力士乐也在里面(见图16)。  图15 常用的工业标准都纳入了OPC UA  图16 OPC UA工业界发起人 我国现在又提了一个《5G应用“扬帆”行动计划》,这个“扬帆”任务的第二条:5G在每个重点行业示范应用标杆数量2023年要达到100个。工程机械算不算一个行业?发布这条新闻的时候,他的背景图就是山河智能的旋挖钻,所以国家一直知道工程机械必须想办法用5G和远程服务。而且国家组织开发了大量的模组。 数字孪生-需要经济杠杆撬动我们要实现要用什么方法呢?我们想到了一个用杠杆的方法来撬动发展,未来的液压和工程机械是三维的系统,即通信系统,机械系统,电液控制系统。这样的一个系统相当复杂,我们必须有一个集成、跨界的概念,谁能跨过工程机械和液压这个界去做网络的控制,这是我们需要考虑的。我们将来会建立一个IOP平台,为什么叫IOP,不叫IOT,IOT平台里的这个“T”是things,叫万物互联。对不起,5G不是万能的,如果万物互联,那么乱七八糟的东西都给你占了,通讯的数据实时性就没了。所以国家想到这问题了,我们可能会叫IOP,“P”是platform,那么几个行业一起用IOP来解决这件事情。有了5G以后,开发软件的公司可以通过收取使用软件的授权流量费来盈利,不用国家给太多钱。另外仿真现在有个问题,怎么交互?比如说这是主机厂,这是学校的仿真平台,他没法交流,我们未来给大家建立一个数字孪生的平台,学校仿真的结果到这个数字孪生平台,数字孪生平台到主机厂的平台,主机厂的平台可以下载控制器,完全可以避开所谓的版权问题,也完全可以让我们的仿真变成实际化(见图17)。 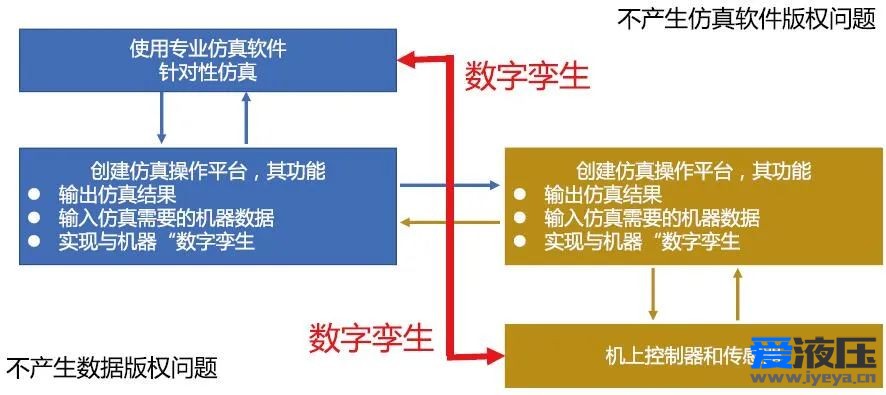 图17 新的工程机械研发理念:新型数字孪生平台 这时候我们需要创建 “技术合作共同体”,这个技术合作共同体就是未来我们搞液压的、搞电控的等等,全都用网络连在一起,主机厂可以任意选择合作伙伴,愿意找谁做液压,愿意要谁做监控,自由选择。然后这些要给到政府及相关的协会进行安全监督,你的碳排放是不是合格了,一目了然,国家能控制(见图18)。  图18 组建工程机械技术发展共同体:共建、共享、共赢 所以这件事情难就难在这儿了,我这里用三维的坐标来谈这件事情,我们现在是二维,是液压件厂跟主机厂,现在又增加一维,这一维是什么呢?包括GPS定位,中国叫 GNSS,5g通讯,云地同步,软件仿真,这都是一个新的概念,所以未来的合作是三维的系统(见图19),三维的系统画这么多箭头,就是谁都有各种不同的联络方式,怎么能让他的联络方式是畅通的,才能起到这个作用。 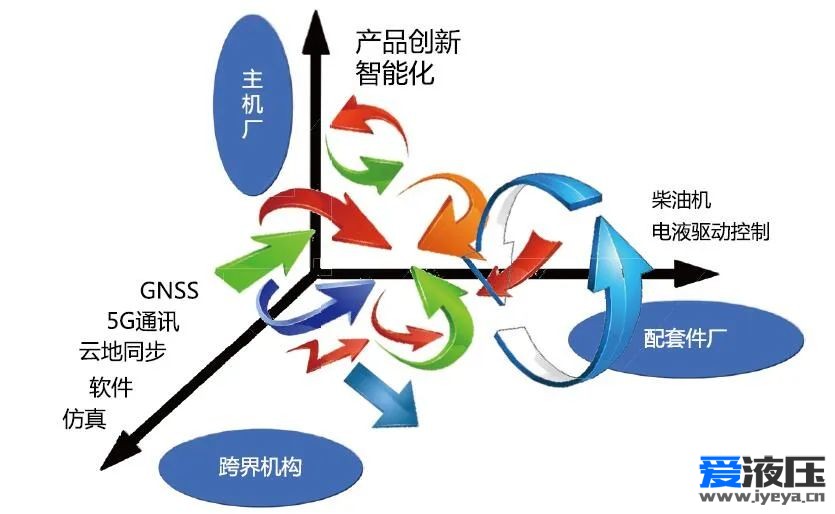 图19 去中心化,区块链链接 大家都关心特斯拉撞车的事情,我也关心,特斯拉汽车给了我很多启发,特斯拉用的是博世公司的iBooster,世界上大部分的名牌汽车用的都是这个刹车系统,不可能这个刹车系统到了特斯拉就出毛病了。这个刹车系统和我们过去讲的防跑偏、防滑已经完全概念不一样了,大家看看这套刹车系统(见图20),非常复杂的闭环控制软件。 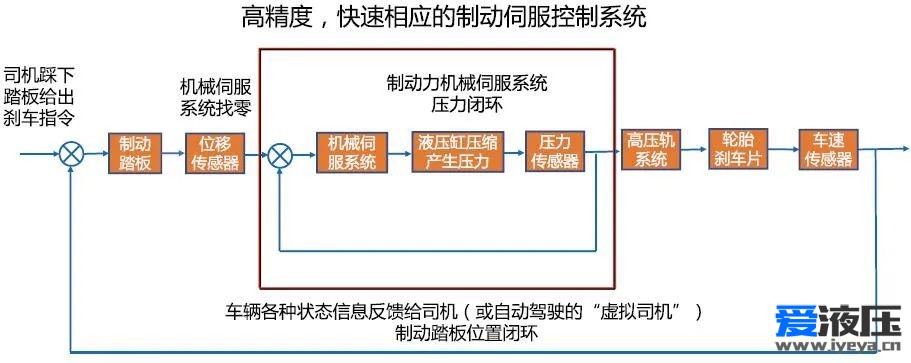 图20 高精度快速相应的制动伺服控制系统 这是iBooster的内部结构(见图21),里边包括伺服电机,还有滚珠丝杠、液压系统,搁哪个车上都能用,用了以后就没什么问题。刹车软件一定是Bosch做的,不是特斯拉做的。 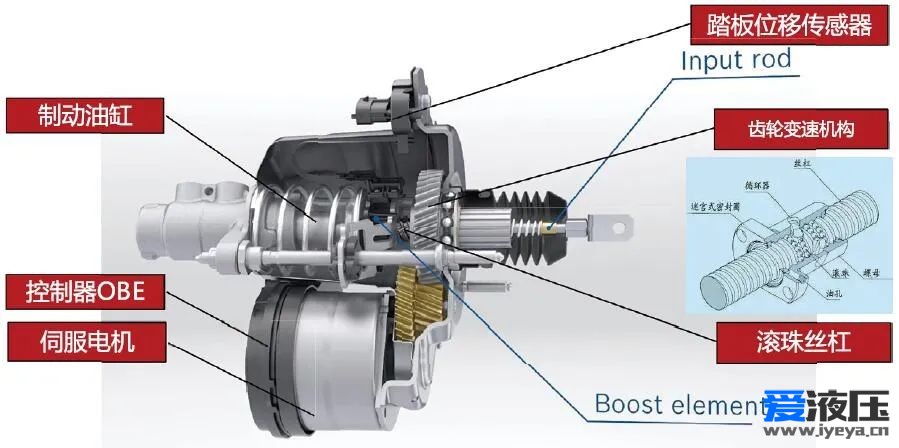 图21 iBooster的内部结构 我们从特斯拉还看到另外一个问题,特斯拉重视中国市场很重要的一点它是考虑到“迭代”,它是要用大量的中国路面车辆行驶的数据去迭代它的控制软件。大家说你讲这个干什么?我是要回答大家一个问题。这次展览会很多人都问我,我们作液压的也想做电控,人家主机厂不让我做,主机厂自己能做。怎么解决这个问题?我用这个图告诉大家(见图22),未来的主机厂要所做的电子控制相当复杂,叫做操作系统,它和汽车的无人驾驶系统相当。这套软件绝对不能用PLC做,它必须用神经元来写,为什么?因为这里的软件是并行的,比如你吊一个重物的时候,要考虑到是否有障碍物,钢丝绳什么状况,液压系统与这些因素怎么能用串行思想来解决呢?但是我们的motion control一定是串行的,未来我们是得到机器的指令以后来做液压系统控制(类似特斯拉的刹车),这时候主机厂还干这事儿吗?他操作系统都干不完,那这时候我们就要用端云协同了,为什么要这样讲呢?现在中国的工程机械和液压主要的一个问题没解决,大家把这个叫灰度。这是一个兔子,兔子里白色的事情我们都解决了,圆圈脸是工程机械,液压耳朵也解决了,但就是主机跟液压交互的地方,灰度的东西没人干。未来我们要干这件事情,用什么方法来干呢?用数字孪生的方法来解决。 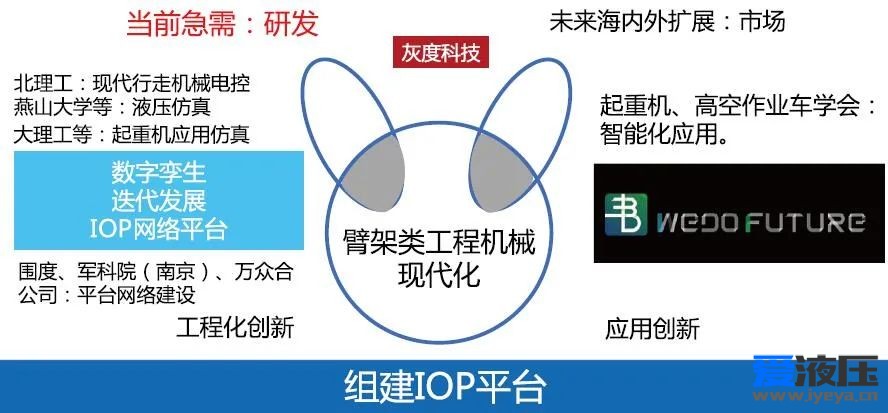 图22 组建IOP 平台 希望中国液压气动密封工业协会将来会采取更多的措施来帮助大家走近液压的新时代。 谢谢大家! |

会员评论